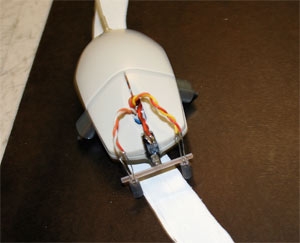
The race is on! Two mice chase one another around a curvy, roughly elliptical white stripe. But, the goal can't be the finish line – because there isn't one. Rather, the contest seems to be: Which mouse will stay on track for the longest time before spinning out of control? Of the two, one clearly "wags its tail" less as its phototransistor eyes guide it along the reflective white strip. The clear favorite belongs to Brandon Smith, an undergraduate researcher in Konrad Lehnert's lab, and Brandon's excited. It's final project time, and his mousebot is outperforming his electronics class instructor Paul Beckingham's robotic racer.
Paul stands close by, beaming like a proud father. He's just spent 11 weeks teaching six students enough basic electronics to turn an ordinary old computer mouse into a MOUSEBOT with "eyes," wheels, motor, and a proportional servo controller. Right up until the race, Paul wasn't completely sure any of the mousebots, including his, would be able to "stay on track."
That's because proportional servo controls are based on the assumption that errors occur linearly, i.e., proportionally. In the real world, however, many systems aren't linear. Servo controls, whether they're monitoring the temperature of ovens, the frequencies of lasers, or the position of a mousebot on a track, often interact with nonlinear systems. And, what you get from a proportional controller directing a nonlinear system can vary from a very sluggish, but somewhat predictable, response to a very rapid, but wildly oscillating, reaction. The latter is exactly what happens to the mousebots after a few times around the track. Suddenly, one spins round and round in a tight circle, seemingly unable to get back on track. The other crosses through the middle between two sides of the track, does a 180° turn, and races around the track in reverse.
So what's to be done about this poor servo control? Well, students and postdocs can sign up for Paul's fall electronics class and learn how to make a better mousebot with a PID servo controller. That's a proportional controller with two extra amplifiers that can process the kinds of errors, known as integral and differential errors, that occur in nonlinear systems. The class offers some other good topics, too, including component selection, basic transistor theory, noise sources and control, soldering, electronics assembly, and more. At the end of class, students should be well prepared to work in an experimental physics lab. - Julie Phillips